きゅうりの自動選果マシーン作成(通称:Cucumber-9プロジェクトw)の続きです。
きゅうりの撮影台に、きゅうりを送り出す機能と照明機能を追加しました。
今のところ、自動選果マシーンは、【判定メカ】と【運搬メカ】を分けて作成する予定で、今回作った送り出し機能は【運搬メカ】へきゅうりを受け渡す機構になります。
照明は単純に暗いから付けました。
送り出し機構
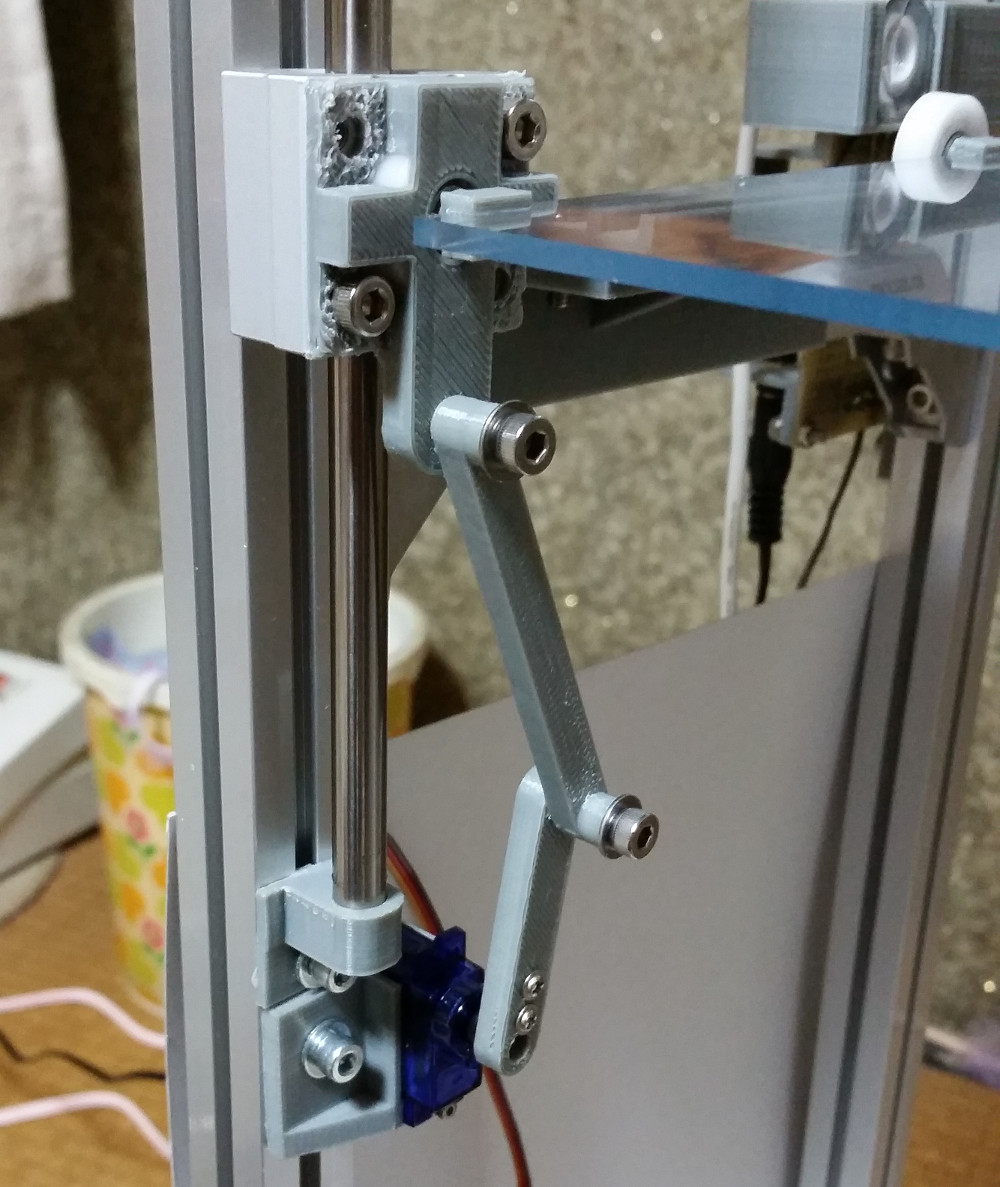
送り出しの仕組みは、台を傾けながら前に押し出すことで、台の上に乗ったキュウリを撮影台の手前に落としています。
動きは下の映像を見て頂けると分かると思いますが、台の前方を固定して上下運動をさせているだけです。
送り出し機構については、色々と悩んだ挙句、制御が簡単そう&安上がりという理由で今回の方法に決めました。
実際、クランク機構を使ってサーボ1台だけで制御しています。
主な材料
マイクロサーボ(SG92R) ¥500
リニアブッシュ ¥617
シャフト200mm ¥810
プラスチックベアリング3個 ¥72/個
ネジ数個など
主な材料は全て、秋月電子通商とミスミで買いました。便利な時代になったもんだ(笑
その他、細かなリンク部品などは3Dプリンターを使って印刷しています。
サーボの制御は、最近使ってなかったBlueNinjaでやりました。
まぁ、今回は動作確認が目的なので何でもよかったのですが、最終的にどうするか考えておかねば…
さて、何度かテスト作動をしてみて、一応いけそうな気がしてきたのでこのまま進めます!!
(ただ、サーボのトルクがギリギリっぽいので、もう1ランク上げる予定)
照明

設置環境によらず、ある程度明るさが稼げるよう照明を付けました。
使ったのは、
超高輝度面発光白色LEDモジュール 40x30mm ¥540
これを2枚使って、上下から照らしています。
ただ、これ“超高輝度”というだけあり、かなり眩しいです(*_*;
可変抵抗を使って調整できるようにした方が良さげです。
あとがき
さて、撮影台については、これでほぼ完成です。
来週からはやっと実際に学習用データを撮る作業に移る予定。
まだまだやることは山積みなんだよな…
step by step
ではでは〜。




