とりあえず、写真のみ。
*時間が取れたら仕組みなどちゃんと書きます
*進捗状況はまだ半分ほど。これから精度アップと機能追加を行う
2017/08/01追記
試作3号機の概要についてブログに書きました!詳しくは下記リンク参照願います。
キュウリの仕分け機(試作3号機)-概要-

中央にテーブルがありきゅうりを置くと、上部のカメラできゅうり画像を取得し、画像からきゅうりの等級を自動的に判定します。
右側にはラズパイが内蔵されており、様々な機能を呼び出すことができる(予定)。
例えば、作業をしながら、ディープラーニング用の教師データを登録したり、間違った画像のラベル付け直しを行ったりなどを考えています。
あとは、過去の仕分けデータを参照したり、きゅうりを使ったゲームをしたりなどwww
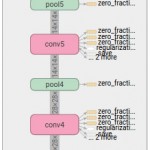
ディープラーニング部分は相変わらずTensorFlowで実装。

上部には3台のWebカメラを設置。3台のカメラで取得した画像をマージして1枚の大きな画像に変換しています。

合成画像はこんな感じ。つなぎ目が目立ちますね…

位置合わせは、テーブル(の下のモニター)にマーカーを表示することで行います。
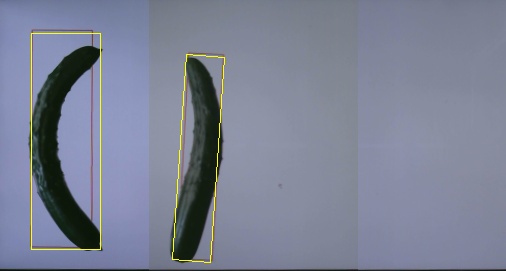
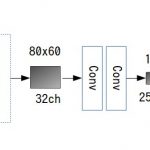
きゅうり領域を特定して、あとは2号機と同じく画像から等級を判定。
あとがき
今年もMakerFaireTokyoに応募しました!
結果発表はもう少し先ですが、今年もビックサイトできゅうりの仕分けができるといいな!