きゅうり仕分け機の一部として、きゅうりを運搬するためのベルトコンベアを作りました。
動力はステッピングモーターを使用し、Arduinoで制御しています。
こんなの。
700gの木片を動かしています。
部品
今回はヘッドドライブタイプのベルトコンベアを作成します。
参考:コンベアとは?
必要な部品は、
1.ドライブプーリー(タイミングプーリー)
2.テールプーリー
3.モーター&タイミングベルト
4.テンションプーリー
5.ベルト
6.フレーム
です。
なお、作成した3Dプリンタデータは下記に置いてあります。
http://www.thingiverse.com/thing:1700296
1.ドライブプーリー
ベルトを駆動させるためのプーリーです。
今回は直接プーリーに溝をほって、タイミングベルトで直接モーターと接続する構造にしました。

プーリー本体は、ホームセンターで買ってきた塩ビパイプを使用。長さは110mm。
タイミングプーリー部分は3Dプリンターで作りました。
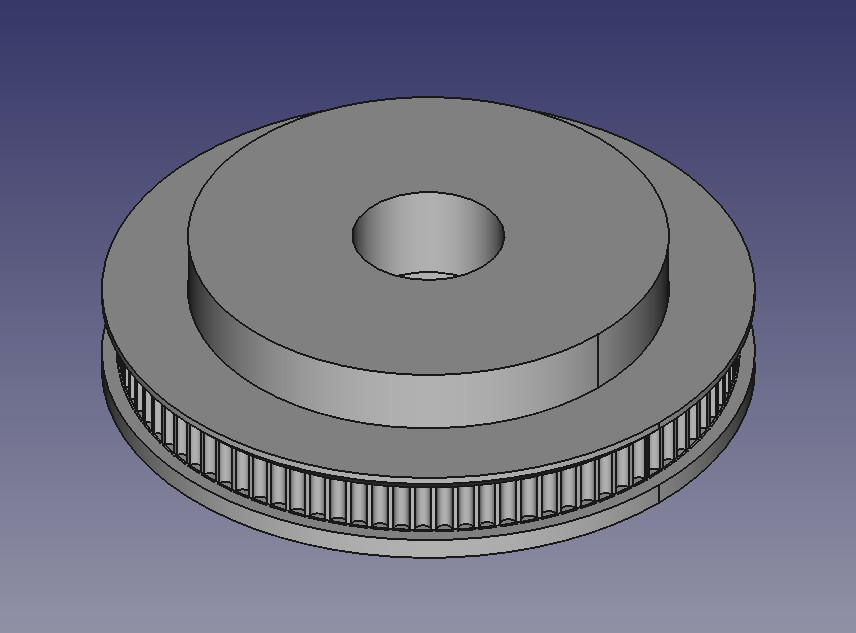
2GT用プーリで、歯数90T(PD:57.3mm OD:56.79)。
(正確に作ってもそれを出力できるだけの性能が手持ちの3Dプリンターにはないので、かなり適当に作ってます)
反対側の部品。
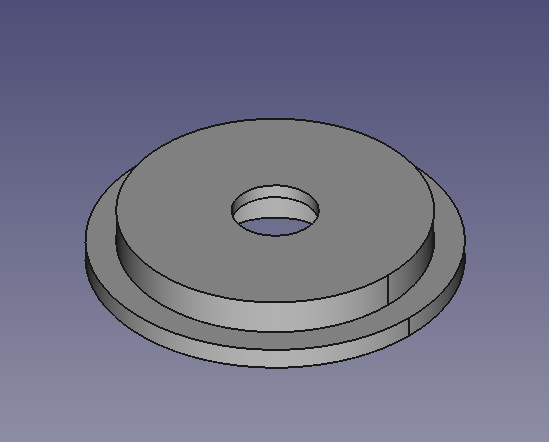
どちらの部品も中心に、外形19φ(内径6φ)のベアリングを挿入出来るようにしてあります。
ベアリングは下記で購入。
【C-VALUE】小径玉軸受 両シールド形 @75円
2.テールプーリ
今回は部品点数を減らすために、ドライブプーリを流用。
3.モーター&タイミングベルト
こちらは下記から購入。
42mm ステッピングモータ 2.8V 2相 400ステップ 1900円
2GT 歯ピッチ2㎜・ベルト幅4㎜(低発塵ベルト)_2GT 475円(ピッチ周長360mm)
タイミングプーリ 1.5GTタイプ・2GTタイプ 1640円(歯数32T)
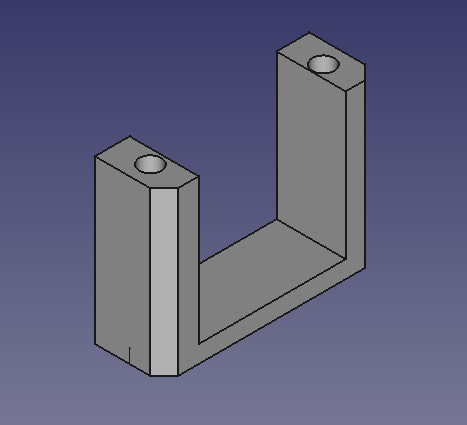
あと、モーターを固定するためのL字フレームをホームセンターで買ってくる。
そして固定用部品を印刷。
モータ側のギアは歯数32T、プーリー側のギアは歯数90Tなので、ギア比は2.8
4.テンションプーリー
今回はプーリーの代わりにベアリングを使用しました。
プラスチックベアリング 外周フラットタイプ_DR-H @90円(外径22φ、内径6φ、幅7mm)
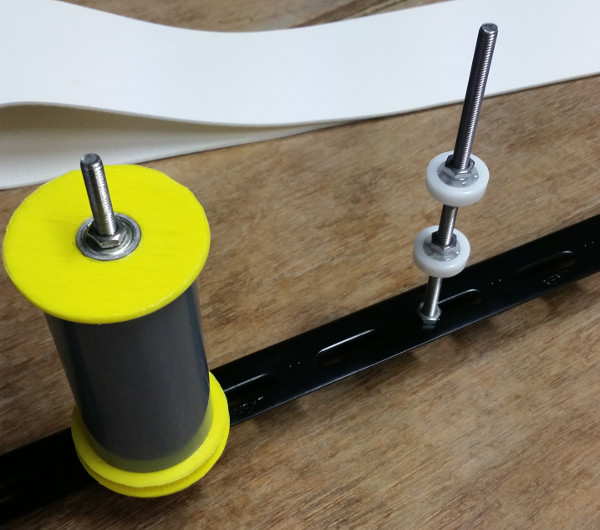
ベルトのテンションの調整機構は、テールプーリの取り付け位置をネジで調節できるようにしました。
(テンションをかける場合は、取り付け位置を後ろにずらす)

5.ベルト
ベルトも下記から購入。
平ベルト -標準タイプ- 2587円(ベルト幅100mm、ベルト周長1.55m)
比較的安いけど出荷まで日数がかかります(11日ほど)。
6.フレーム
フレームはよくホームセンターで売ってるNEXTって書いてある棚用フレームと、150mmのM6ボルトを使用。

組み立て方
…写真をみてね!(すいません書くのがめんどいので…)
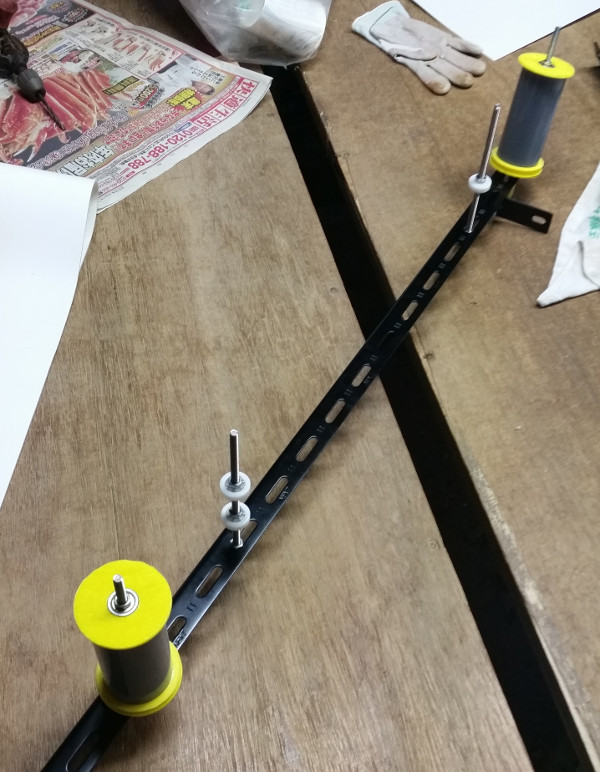
フレームに150mmボルトを固定し、プーリーを固定し、ベアリングを取り付ける。

ベルトを通す。タイミングベルトを入れておくのを忘れずに!

モーター固定。

テールプーリでベルトテンションの調整。
ベルトが滑らない程度で調整。

タイミングベルトのテンションも、外れない程度で調整。

完成です…(ずいぶん端折ったな)
ベルトの下にプラダンを引くと適度に滑るし、ベルトがたわむのを防げます。
制御部
モーター制御には下記を使用しました。
1.L6470 ステッピングモータ・ドライバキット
2.Arduino micro
定格電圧2.8Vのモーターを、パソコンの電源を流用して12Vで駆動するため、ドライバ側の設定で出力を下げています。
サンプルスケッチ
#include <SPI.h>
#include <Wire.h>
#define PIN_SPI_CS 10
void L6470_write(unsigned char val) {
digitalWrite(PIN_SPI_CS, LOW);
SPI.transfer(val);
digitalWrite(PIN_SPI_CS, HIGH);
}
void L6470_setup() {
L6470_write(0x00); //nop
L6470_write(0x00);
L6470_write(0x00);
L6470_write(0x00);
L6470_write(0xc0); //リセット
L6470_write(0x07); //最大回転スピード(10bit)
L6470_write(0x00); // 40h = 976step/s(resolution 15.25step/s)
L6470_write(0x40);
L6470_write(0x09); //モータ停止中の電圧設定(8bit)
L6470_write(0x3b);
L6470_write(0x0a); //モータ定速度回転の電圧設定(8bit)
L6470_write(0x3b);
L6470_write(0x0b); //加速中の電圧設定(8bit)
L6470_write(0x3b);
L6470_write(0x0c); //減速中の電圧設定(8bit)
L6470_write(0x3b);
L6470_write(0x13); //オーバカレントの電流スレッショルド(4bit)
L6470_write(0x0F);
L6470_write(0x14); //ストールの電流スレッショルド(7bit)
L6470_write(0x7F);
}
void setup() {
Serial.begin(9600);
pinMode(PIN_SPI_CS, OUTPUT);
SPI.begin();
SPI.setBitOrder(MSBFIRST);
SPI.setDataMode(SPI_MODE3);
SPI.setClockDivider(SPI_CLOCK_DIV4);
L6470_setup();
}
void loop() {
//動作テスト
delay(500);
L6470_write(0x51); //正転
L6470_write(0x00);
L6470_write(0x40);
L6470_write(0x00);
delay(10000);
L6470_write(0xb0); //停止
delay(500);
L6470_write(0x50); //逆転
L6470_write(0x00);
L6470_write(0x40);
L6470_write(0x00);
delay(10000);
L6470_write(0xb0); //停止
}
※多分動くと思うけど、このコードでの動作確認はやってないです。
以上で、完成です。
これで自宅で回転寿司パーティーが開けますねwww
あとがき
さて、ベルトコンベア作ってみましたが、これかなり有効利用できそうかなと思ったり。
もっと小さくして卓上ベルトコンベアとか作ってもいいかもですね。
ではでは〜。





Very nice job.
And thank you for putting the parts on thingiverse.
I might try to build one myself!
Let’s enjoy DIY!
ブログを拝見いたしました。
自作ベルトコンベアは、すごいです。!
私もやってみたいのです。
最近、arduinoは、少し触りました。
3dプリンタは、難しそうですので、まだ、やってません。
もしよろしければ、パーツだけでも作成下さればうれしいです。
もちろん有料ということで、できれば、お願いします。m(__)m
お問い合わせありがとうございます。
自作ベルトコンベア、是非作ってみてください!
arduinoを使って自由にコントロールできるので、何かと役に立ちますよ(^o^)
パーツは材料費+送料で作成します。